Implementing a Mini OS(Notes)
# linux, 2020-07-24
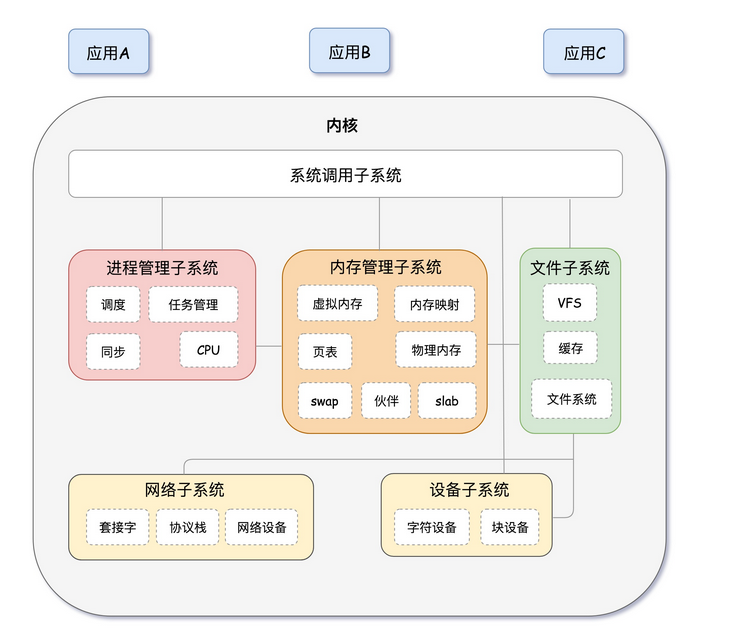
- 内核体系结构图
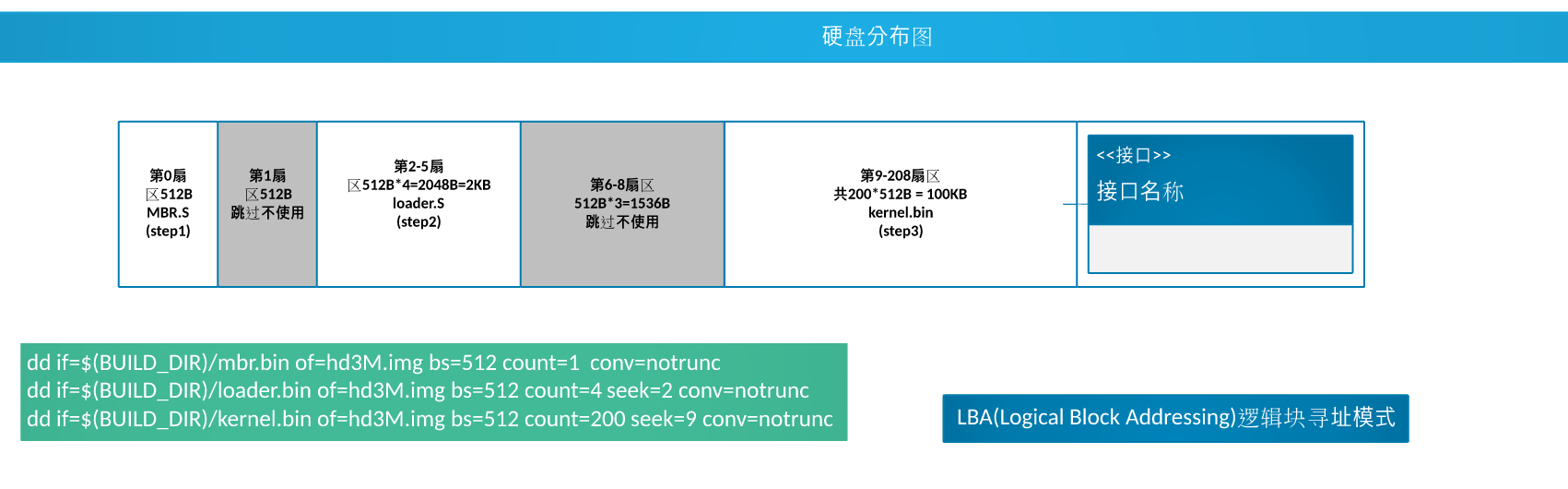
- bochs 的:硬盘分布图
- 1、实模式
- 附:Linux 初始化过程
- 2、HuSharp_OS 内核线程/用户进程
- 3、中断和系统调用
- 4、内存管理
- 5、任务调度
- 6、文件系统
- 7、Shell
- 8、锁
- 9、环形队列
- define K_HEAP_START 0xc0100000
源码,本项目基于《操作系统真象还原》一书,实现了一个 mini 操作系统,包含:
1)内核线程、用户进程、fork和execv、任务调度;
2)中断(时钟,键盘,硬盘,系统调用等)、内存管理、文件系统、shell、管道;
3)基于二元信号量的锁、环形队列。
内核体系结构图
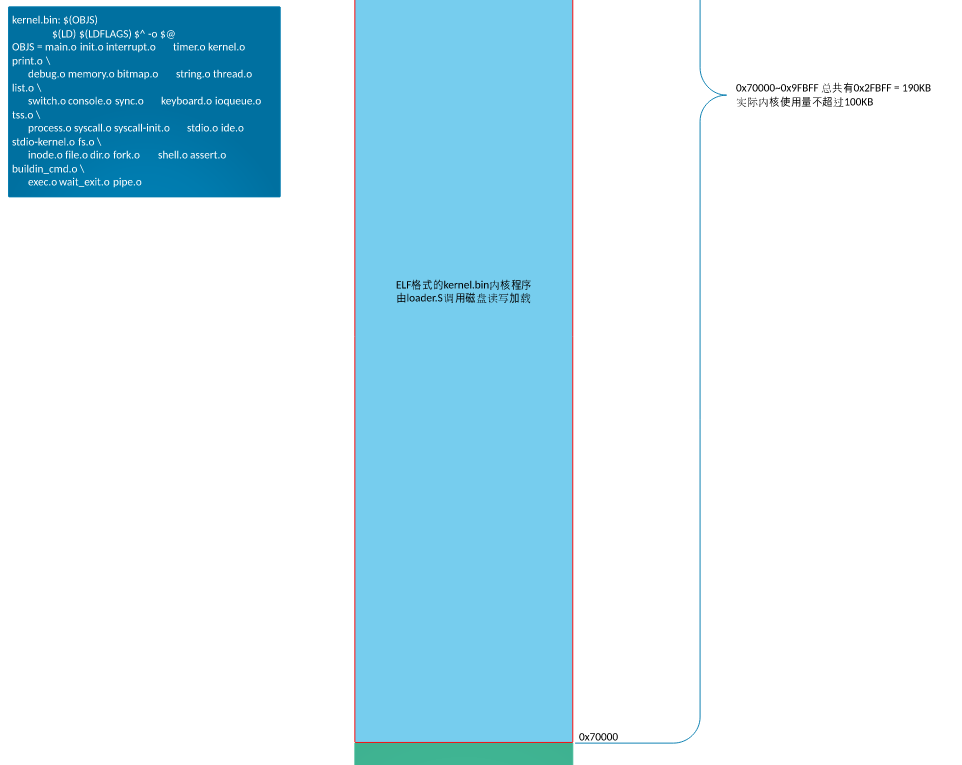
bochs 的:硬盘分布图
魔数 栈边界 20000611 文件系统 20000712
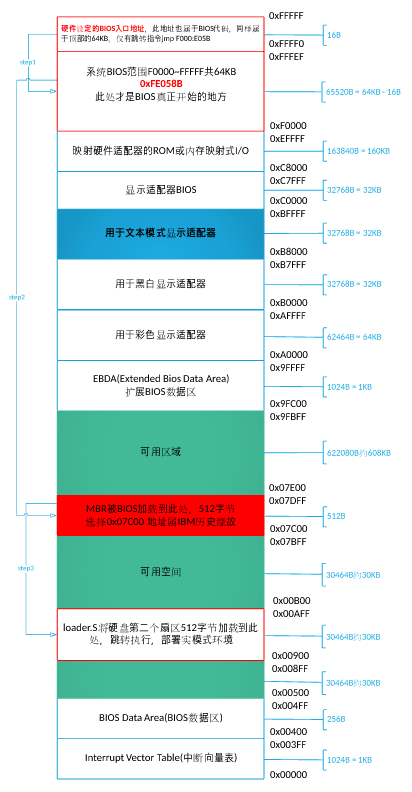
空间布局大致介绍
...
可用空间 <--- 0x9fc00
栈 <--- 0x9f000
...
内核文件 kernel.bin <--- 0x70000
...
MBR <--- 0x7c00
...
内核映像 kernel <--- 0x1500
...
loader.bin(GDT所在处) <--- 0x900
可用空间 <--- 0x500
BIOS数据区 <---0x400-0x500
中断向量表 <---0~0x3ff
1、实模式
BIOS->MBR->loader->加载内核
BIOS ->1.1 硬件自检->1.2 启动顺序(有一个外部储存设备的排序,排在前面的设备就是优先转交控制权的设备)->主引导记录
1、BIOS & MBR
ROM 中写入”基本输入输出系统”(Basic Input/Output System),简称为BIOS。
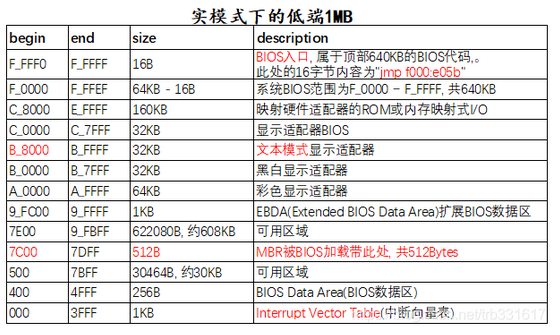
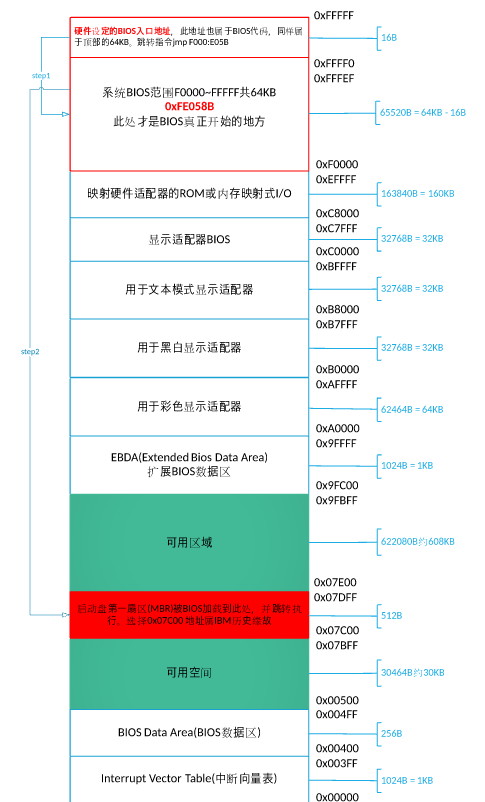
首先在开机的一瞬间,CS:IP 强制初始化为 0xF000:0xFFF0即为BIOS入口地址 BIOS: 0xF0000-0xFFFFF 64KB都为系统 BIOS 范围,被写入ROM中
-
FFFF0-FFFFF BIOS的入口地址,16B大小中只有这么一条语句:
jmp f000:e05b,剩下的作为保留; -
1)检测、初始化硬件,硬件自己提供了一些初始化的功能调用,BIOS直接调用;
2)在内存 0x000 - 0x3FF 建立中断向量表 IVT,这样就可以通过”int 中断号”来实现相关的硬件调用。这些功能的实现也是基于对硬件的 IO 操作。不过在保护模式下,中断向量表已经不存在了,取而代之的是中断描述符表IDT(Interrupt Descriptor Table)。
(因为现在还要用键盘和鼠标,这些都要通过中断进行的。——————此时需要也要给客户输出一些结果,因为需要你自己(os)来,所以你还要充当客户对接人。你做了什么工作,做到了什么程度,都要主动显示给客户,也就是在内存空间映射显存的空间,在显示器上显示一些字符。)
-
检测0盘0道1扇区的内容(MBR所在处)
“主引导记录”(Master boot record,缩写为MBR)
MBR:位于0盘0道1扇区(由于是 CHS扇区表示方法,即为最开始扇区),末尾为 0x55aa,被识别末尾魔数后,被加载到 0x7c00
对于 Linux 而言 MBR 相当于由 grub2 第一个要安装的 boot.img
- 大小为 512 字节
- 27c00:历史原因——尽可能留足够的空间给操作系统在 32K 内加载自己 ` 0x7FFF - 512 - 512 + 1 ` // 开机扇区512字节,再留出512字节
- 引导记录由三个部分组成:
- 第1-446字节:调用操作系统的机器码。
- 第447-510字节:分区表(Partition table)。
- 第511-512字节:主引导记录签名(0x55和0xAA)。
2、boot loader
小知识
boot的含义
先问一个问题,”启动”用英语怎么说?
回答是boot。可是,boot原来的意思是靴子,”启动”与靴子有什么关系呢? 原来,这里的boot是bootstrap(鞋带)的缩写,它来自一句谚语:
”pull oneself up by one’s bootstraps”
字面意思是”拽着鞋带把自己拉起来”,这当然是不可能的事情。最早的时候,工程师们用它来比喻,计算机启动是一个很矛盾的过程:必须先运行程序,然后计算机才能启动,但是计算机不启动就无法运行程序!
早期真的是这样,必须想尽各种办法,把一小段程序装进内存,然后计算机才能正常运行。所以,工程师们把这个过程叫做”拉鞋带”,久而久之就简称为boot了。
载入 LOADER 进入实模式环境
(Linux环境中,目前最流行的启动管理器是Grub。相当于 Linux 中加载 grub2 的另一个镜像 core.img。)
在loader.S 加载内核时,主要完成以下任务:
-
调用 BIOS 中断获取内存大小;
-
构建 GDT,开启保护模式;
-
加载 kernel : 将内核文件先放到内存缓冲区
-
构建页目录表和页表,开启分页机制;
-
初始化内核:解析kernel的ELF,将ELF文件中的段segment拷贝到各段自己被编译的虚拟地址处,再跳去执行
loader.bin 的加载地址为 0x900,放在第 2 块扇区( boot.inc)
loder.bin 占用 3 个扇区,即使用第 2~4
至于为啥是 0x900,是由于实模式的内存空间布局下0x500 - 0x7BFF 为可用区域,而为啥不是 0x500 ,是完全个人喜好,隔远点
1)调用BIOS中断获取内存大小
调用 BIOS 中断 0x15 获取内存大小,并将其值存放在 loader.bin头部(地址0x900),内核将会从该位置读取内存大小(kernel/memory.c mem_init())。
2)构建 GDT,开启保护模式
2.1 构建GDT(全局描述符表)。
FILE: boot/loader.S
;构建gdt及其内部的描述符
GDT_BASE: dd 0x00000000
dd 0x00000000
CODE_DESC: dd 0x0000FFFF
dd DESC_CODE_HIGH4
DATA_STACK_DESC: dd 0x0000FFFF
dd DESC_DATA_HIGH4
VIDEO_DESC: dd 0x80000007 ; limit=(0xbffff-0xb8000)/4k=0x7
dd DESC_VIDEO_HIGH4 ; 此时dpl为0
2.2 加载GDT。lgdt指令,将 GDT 的基地址、界限值载入至 GDTR 寄存器。
2.3 打开地址线 A20。
第 21 条地址线 A20 :实模式下,处理器访问内存的方式是将段寄存器的内容左移4位,再加上偏移地址,以形成 20 位的物理地址。实模式下,32位处理器的段寄存器的内容仅低 20 位有效,高 20 位全部为0(即,只能使用 20 根地址线)。故,处理器只能访问1MB内存。(回绕)
2.4 禁止中断。
在设置好保护模式下的中断环境之前,必须关中断(指令cli)。保护模式下的中断机制和实模式不同,原有的中断向量表 IVT 不再适用。而且,保护模式下,BIOS 中断也不能再用,因为它们是实模式下的代码。
2.5 将 CR0 的 PE 位置 1,开启保护模式。
控制实模式/保护模式切换的开关是CR0寄存器。CR0是处理器内部的控制寄存器(Control Register),是 32 位的寄存器,包含了一系列用于控制处理器操作模式和运行状态的标志位。 CR0 的第 1 位(位 0 )是保护模式允许位(Protection Enable, PE),该位置 1 ,则处理器进入保护模式,按保护模式的规则开始运行。
;----------------- 打开A20 ----------------
in al,0x92
or al,0000_0010B
out 0x92,al
;----------------- 加载GDT ----------------
lgdt [gdt_ptr]
;----------------- cr0第0位置1 ----------------
mov eax, cr0
or eax, 0x00000001
mov cr0, eax
3)加载 kernel
将内核文件先放到内存缓冲区
KERNEL_BIN_BASE_ADDR equ 0x70000 ; 自定义kernel被加载到物理内存位置
KERNEL_START_SECTOR equ 0x09 ; 自定义kernel位于硬盘的扇区号
; ------------------------- 加载kernel ----------------------
mov eax, KERNEL_START_SECTOR ; kernel.bin所在的扇区号
mov ebx, KERNEL_BIN_BASE_ADDR ; 从磁盘读出后,写入到ebx指定的地址
mov ecx, 200 ; 读入的扇区数
call rd_disk_m_32 ;功能:读取硬盘n个扇区
4)构建页目录表和页表,开启分页机制
地址转换,是由处理器和操作系统共同协作完成的,处理器在硬件上提供地址转换部件,操作系统提供转换过程中所需要的页表。

开启分页机制之前,加载到 cr3 寄存器中的页目录表基地址是物理地址,页表中页表项的地址自然也是物理地址了。虽然内存分页机制的作用是将虚拟地址转换成物理地址,但其转换过程相当于是在关闭分页机制下进行的,过程中所涉及到的地址都被 CPU 当作物理地址直接送上地址总线,不会被分页机制再次转换(否则会递归转换下去)。
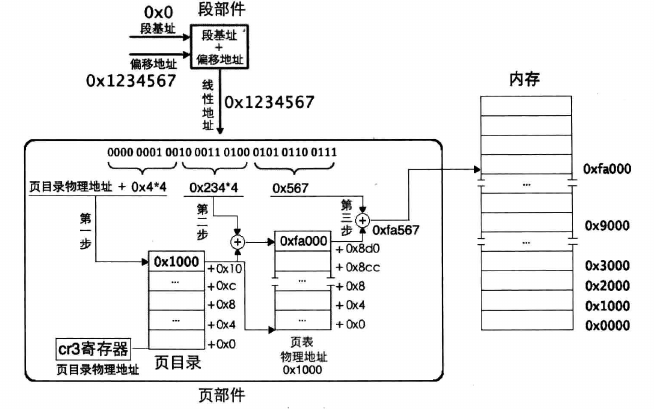
明显 4 K 大小的页表代表 (4K/4)*4K=4M 大小的物理内存
4.1 物理内存 1MB 之上:
第 1 个4KB, 为页目录表PDT
第 2 个4KB, 为创建的第一个页表(第0和第768(0xc00/4= 768)个页目录项都指向它)
这是由于,操作系统的内核位于物理地址的 1MB 以下,但是 OS 的虚拟地址位于 0xc0000000 以上的 1MB 该地址对应的页目录项取决于前 10 位,即 0xc00,为第 768 个目录项。
第769~1022个页目录项一共指向254个页表(即内核空间)
最后一个页目录项(第1023个)指向页目录表PDT本身
为了确保各个用户进程都共享内核,那么需要各个进程第 768~1022 个页目录项均相同,因此在为用户进程创办页表时,应将内核页表中第 768~1022 个页目录项复制到用户进程页目录表相同位置。
因此,共 256 个页,正好 1M 。即,物理内存 1MB 之上的 1MB 已用于页目录表和页表。
4.2 控制寄存器 CR3 指向页目录表基地址
4.3 将 CR0 的 PG 位置1,开启分页机制
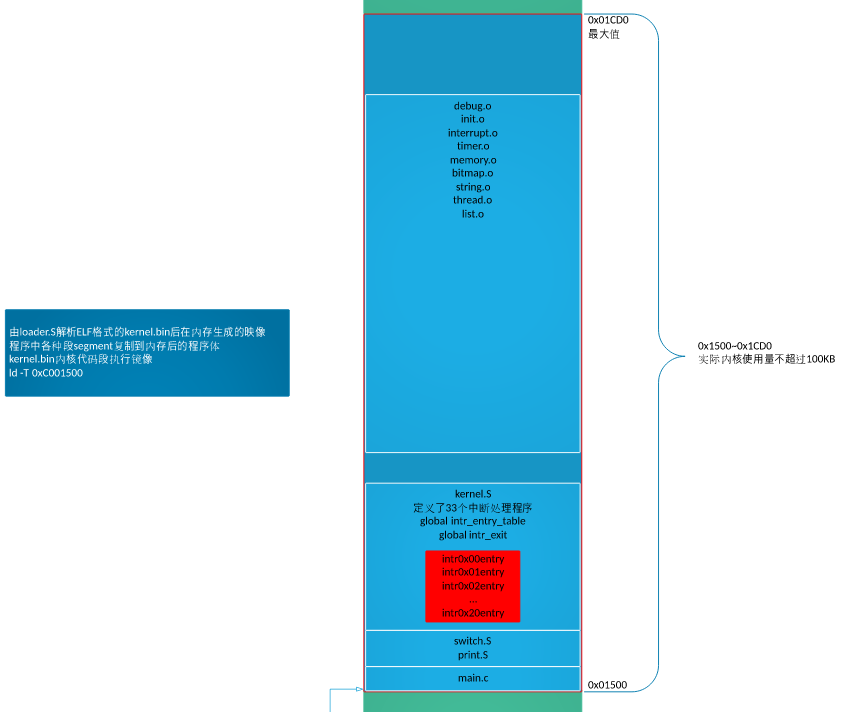
5)解析kernel的ELF
将ELF文件中的段 segment 拷贝到各段自己被编译的虚拟地址处,将这些段单独提取到内存中,这就是所谓的内存中的程序映像。分析程序中的每个段 segment ,如果段类型不是PT_NULL(空程序类型),就将该段拷贝到编译的地址中
这里将kernel的入口定义为 0xc0001500,对应的在编译内核kernel.bin时需要指定该地址。
0x1500(这是由于 loder.bin +2000=0x10d0 凑个整,到0x1500【2000是由于估摸 loder 不会大于 2000 字节】)
ld -m elf_i386 -Ttext 0xc0001500 -e main -o kernel.bin %.o
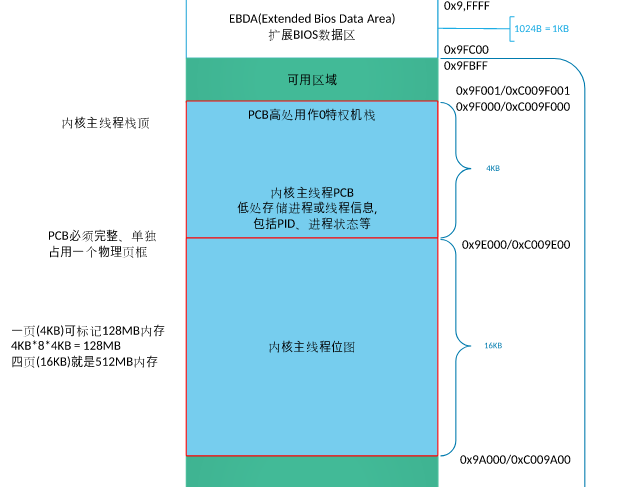
至于栈选用 0x9f000 是由于首先 0x9fc00 以下为可用区域,但是为了之后放 PCB 取整,因此放在此处。
目前所用空间
...
可用空间 <--- 0x9fc00
栈 <--- 0x9f000
...
内核文件 kernel.bin <--- 0x70000(随便选的
...
MBR <--- 0x7c00
...
内核映像 kernel <--- 0x1500(这是由于 loder.bin +2000=0x10d0 凑个整,到0x1500(2000是由于估摸 loder 不会大于 2000 字节))
...
loader.bin(GDT所在处) <--- 0x900
可用空间 <--- 0x500
BIOS数据区 <---0x400-0x500
中断向量表 <---0~0x3ff
6)跳转
; FILE: boot/loader.asm
; 截取部分代码
KERNEL_ENTRY_POINT equ 0xc0001500
mov esp, 0xc009f000 ; 自定义内核主线程PCB中的栈顶
jmp KERNEL_ENTRY_POINT
至此,进入 kernel 即 main。
附:Linux 初始化过程
我们知道系统是从BIOS加电自检,载入MBR中的引导程序(LILO/GRUB),再载入linux内核開始执行的,一直到指定shell開始执行告一段落,这时用户開始操作Linux。
首先介绍 Linux 的初始化
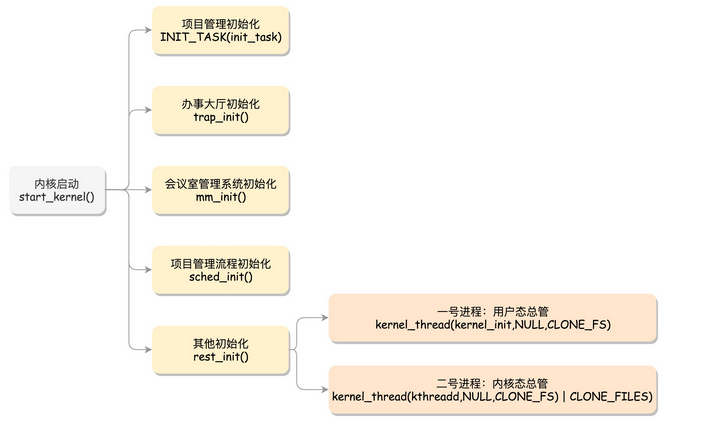
start_kernel –>rest_init –> init –> kthreadd –> cpu_idle_loop
在操作系统里面,先要有个创始进程,有一行指令 set_task_stack_end_magic(&init_task)。这里面有一个参数 init_task,它的定义是 struct task_struct init_task = INIT_TASK(init_task)。它是系统创建的第一个进程,我们称为 0 号进程。这是唯一一个没有通过 fork 或者 kernel_thread 产生的进程,是进程列表的第一个。即 idle 进程。
该进程是内核的一部分,所有进程的根进程,它并不执行任何磁盘上的程序,因此也被称为系统进程。
说明一下 rest_init()
-
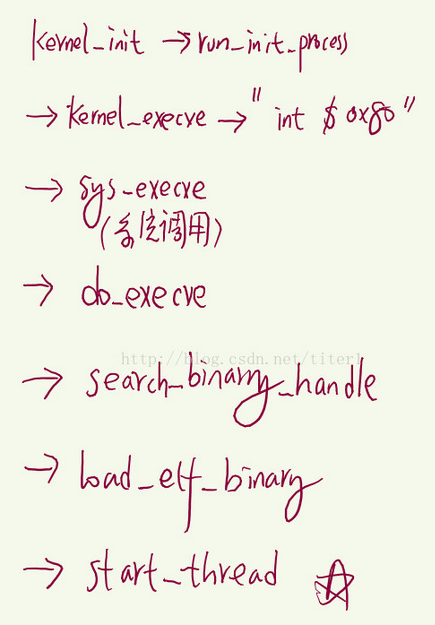
**init **
在 rest_init 的第一大工作是,用 kernel_thread(kernel_init, NULL, CLONE_FS) 创建第二个进程,这个是1 号进程。1 号进程的目的是为了作为用户态的总管。系统中所有其它用户进程的祖先进程。init 进程决不会终止。它是一个普通的用户进程(与交换进程不同,它不是内核中的系统进程),但是它以超级用户特权运行。
当前执行 kernel_thread 这个函数的时候,我们还在内核态,现在我们就来跨越这道屏障,到用户态去运行一个程序。1 号进程 调用 do_execve ,访问内核中保存用户态运行上下文的寄存器们,将用户态的代码段 CS 设置为 USER_CS,将用户态的数据段 DS 设置为 USER_DS,以及指令指针寄存器 IP、栈指针寄存器 SP。再通过 iret 返回 pop 出更改的寄存器, 进入用户态。以进行各种系统的初始化。启动系统的服务,启动控制台,用户就可以登录进来了。
1号进程从0号进程fork出来,然后又切换到用户态,完成控制权从核心态到用户态的转换, 因此用户交互才能开始。
至于 init 为何是 systemd Systemd 入门教程:命令篇见此博客
systemctl
-
kthreadd 页守护进程
rest_init 第二大事情就是第三个进程,就是 2 号进程。这里的函数 kthreadd,负责所有内核态的线程的调度和管理,是内核态所有线程运行的祖先。负责虚拟内存系统的分页操作。
通过 以下命令进行查看,发现 PID 为 1 是 /sbin/init, 2 为 kthreadd
ps -ef其中用户态的不带中括号,内核态的带中括号。
进程号依次增大,但是你会看所有带中括号的内核态的进程,祖先都是 2 号进程。而用户态的进程,祖先都是 1 号进程。tty 那一列,是问号的,说明不是前台启动的,一般都是后台的服务。
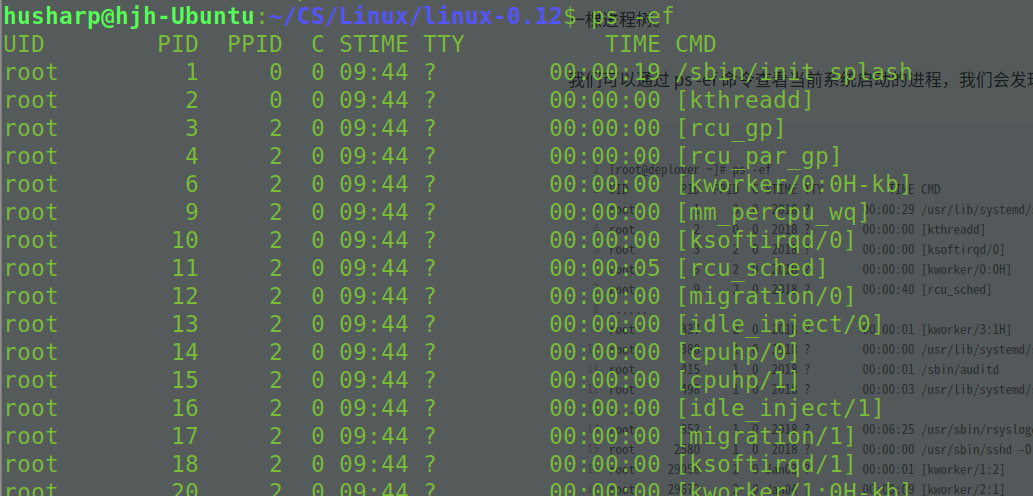
ps -ef 这个命令的父进程是 bash。这样整个链条都比较清晰了。
husharp 26859 8355 0 14:10 pts/1 00:00:00 ps -efhusharp 8355 6773 0 10:42 pts/1 00:00:00 bashhusharp 6773 2294 0 10:17 ? 00:00:01 /usr/lib/gnome-terminal/gnome-tehusharp 2294 1 0 09:45 ? 00:00:00 /lib/systemd/systemd --user从下向上进行索引,发现最后父节点是 init,说明是用户态
因此, idle 实则就是 while ,当没有线程调度时,便运行 idle,在 init 开始后才运行,因此 init 的 pid 为 1 ,而 idle 并非为 1.
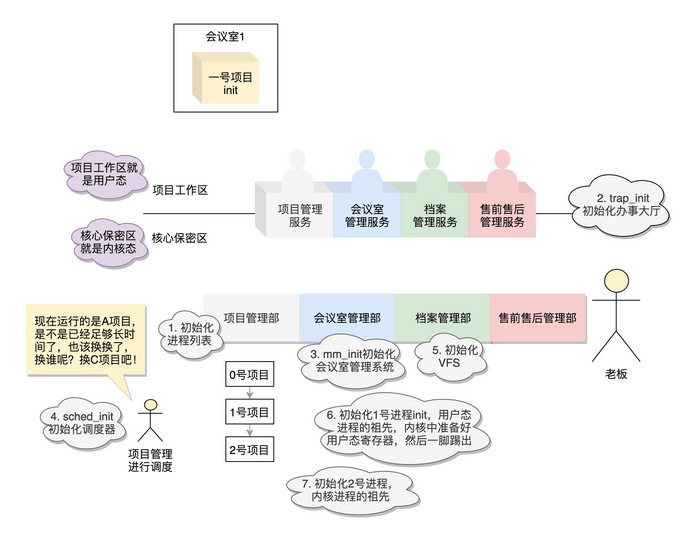
某 ucore 群友做的图
Linux 相关补充阅读
2、HuSharp_OS 内核线程/用户进程
而对于 HuSharp_OS 而言,首先通过 init_all 进行各个初始化 (init.c)
void init_all() {
put_str("init_all start!\n");
idt_init();// 初始化中断
mem_init();//初始化内存管理系统
thread_environment_init();// 初始化线程相关环境
timer_init(); // 初始化 PIT
console_init(); // 初始化 console
keyboard_init();
tss_init();
syscall_init(); // 初始化系统调用
intr_enable(); // 后面的 ide_init 需要打开中断
ide_init(); //初始化硬盘
filesys_init(); // 初始化文件系统
}
在 thread_environment_init (thread.c)中进行相关进程的初始化
void thread_environment_init(void) {
put_str("thread_init start!\n");
list_init(&thread_ready_list);
list_init(&thread_all_list);
lock_init(&pid_lock);
// 创建第一个用户进程 init
// 放在第一个初始化, pid 为 1
process_execute(init, "init");
// 将 main 函数创建为 线程
make_main_thread();
// 创建 idle 线程
idle_thread = thread_start("idle", 10, idle, NULL);
put_str("thread_init done!\n");
}
init 进程
init 是用户级进程,是第一个启动的程序,其 pid 为1。init 是所有进程的父进程。为了抢夺 pid 1,因此我们在 创建主线程的函数 make_main_thread 之前,进行 init 的创建。
init fork 出 shell 程序,以方便用户交互
// init 进程
void init(void)
{
unsigned int ret_pid = fork();
if(ret_pid) // 父进程
{
int status, child_pid;
while(1) // init在此处不停地回收过继给它的子进程
{
child_pid = wait(&status);
printf("i am init, my pid is %d, i recieve a child, it's pid is %d, status is %d\n", child_pid, status);
}
}
else // 子进程
{
my_shell();
}
panic("ERROR: during init, should not be here");
}
main 线程
由于在开机到创建第一个线程前,程序都是有个执行流的,这个执行流从 BIOS 到 mbr 到 loader 到 kernel,他是主线程 main 。因为 main 线程早已运行,咱们在loader.S中进入内核时的mov esp,0xc009f000,就是为其预留了tcb,地址为 0xc009e000。
int main(void)
{
init_all(); // kernel/init.c 初始化所有模块
cls_screen();
console_put_str("[husharp@HuSharp_OS /]$ ");
// 主线程完成使命后退出
thread_exit(running_thread(), true);
return 0;
}
内核的 main_thread 完成系统的初始化工作,然后 thread_exit。
idle 进程
为何会有 idle 进程(0 号进程)?
当就绪队列中没有任务时,调度器没有任务可调时,会报错 thread_ready_list is empty!
// 实现就绪队列为空时,唤醒 idle
if (list_empty(&thread_ready_list)) {
thread_unblock(idle_thread);
}
idle 线程用于系统空闲时,运行(idle :翻译:懈怠的;懒惰的;闲置的;没有工作的。)
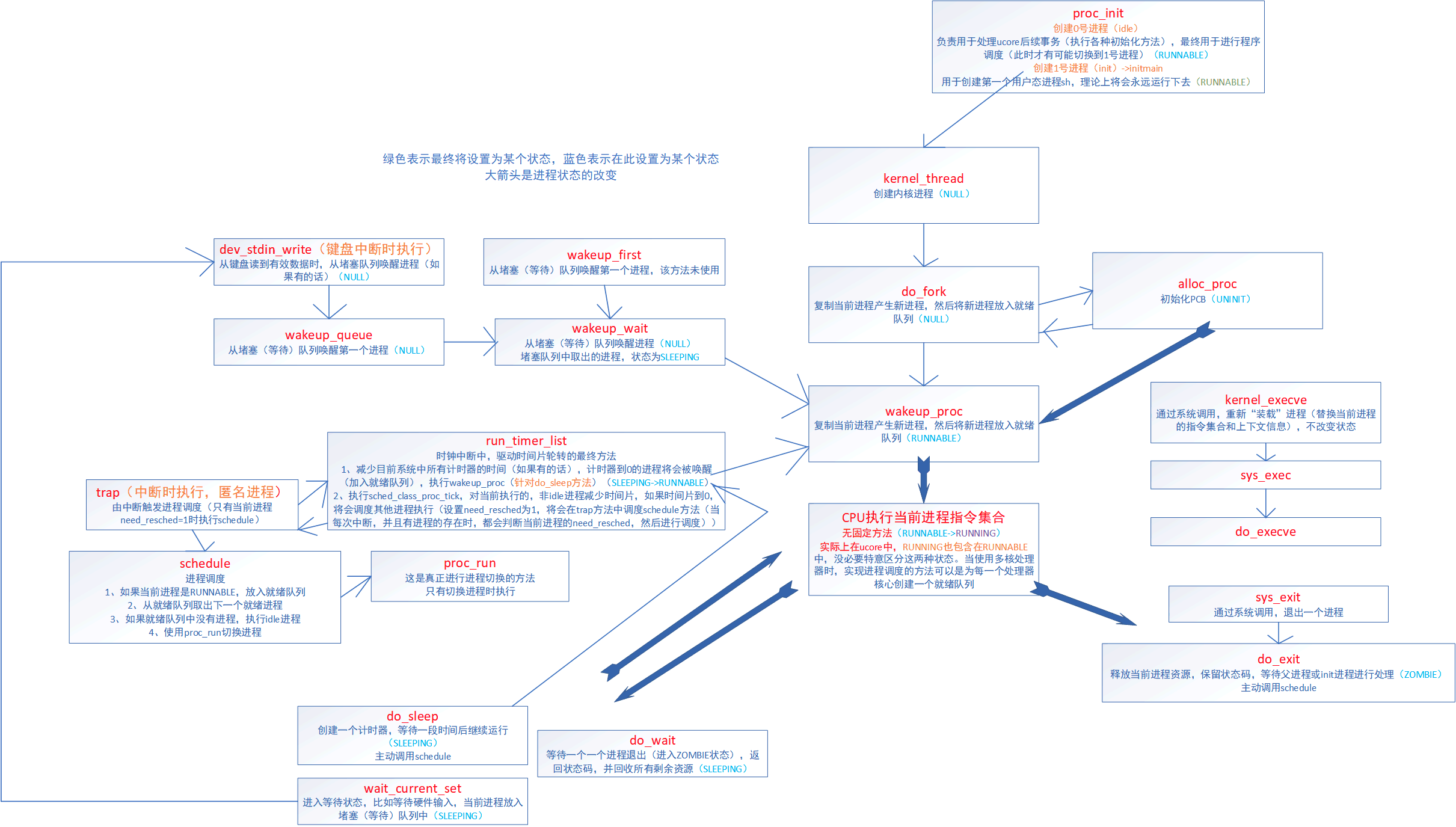
内核线程/用户进程
|---- FILE: thread/thread.c thread_init()
| | 初始化线程环境
| | list_init() 初始化就绪/全部队列
| | pid_pool_init() 初始化pid池,指定起始pid为1 (基于bitmap和lock)
| |
| | process_execute(init, "init") 创建第一个用户进程init,其pid为1
| | make_main_thread() 将当前内核main函数创建为线程
| | idle_thread = thread_start("idle", 10, idle, NULL) 创建idle线程
| |
| | 至此,参与调度的有: init进程、main线程、idle线程
| |
| |---- FILE: user/process.c process_execute()
| | | 创建用户进程
| | | struct task_struct *thread = get_kernel_pages(1) 申请1页内核内存作为用户进程PCB
| | | init_thread() 在PCB中初始化线程基本信息
| | | 申请pid allocate_pid()
| | | {bitmap_scan(); bitmap_set(); return (index + pid_pool.pid_start);}
| | | 进程名、状态READY、内核态时的栈顶(PCB顶部)、优先级、嘀嗒时间数
| | | 初始化文件描述符数组pthread->fd_table[8],标准输入/输出/错误012,其余为-1
| | | 根目录作为默认工作路径 pthread->current_work_dir_inode_id = 0
| | | 父进程pid初始为-1
| | | 页目录表pgdir初始为NULL,在紧接着的create_page_dir()创建页目表时赋值
| | | create_user_vaddr_bitmap() 创建用户虚拟内存空间的bitmap
| | | 指定用户进程虚拟地址起始值; 申请1页内核内存
| | |
| | | thread_create(thread, start_process, filename)
| | | 初始化PCB中的thread_stack。当处理器进入kernel_thread函数体时
| | | 栈顶为返回地址、栈顶+4为参数function、栈顶+8为参数func_arg
| | | kthread_stack->eip = kernel_thread 函数kernel_thread
| | | kthread_stack->function = start_process 函数start_process
| | | kthread_stack->func_arg = filename 待创建的进程
| | |
| | | thread->pgdir = create_page_dir() 创建页目录表
| | | 在内核空间申请一页内存作为用户进程的页目录表 get_kernel_pages(1)
| | | 从内核页目录表中拷贝内核空间的页目录项到用户进程的页目录中 memcpy()
| | | 页目录表物理基地址写入页目录表最后一项
| | |
| | | block_desc_init(thread->u_block_desc) 初始化内存规格信息,为malloc/free做准备
| | | list_append() 添加到就绪队列和全部队列
| |
| |---- FILE: thread/thread.c make_main_thread()
| | | 将 kernel 中 main 函数完善为主线程
| | | main 线程早已运行,在LOADER阶段已预留并指定了PCB "mov esp, 0xc009_f000"
| | | 即,PCB基址为0xc009_e000
| | | main_thread = running_thread();
| | | init_thread(main_thread, "main", 31);
| | | list_append() 添加到全部队列
| |
| |---- FILE: thread/thread.c thread_start()
| | | 创建内核线程
| | | struct task_struct *thread = get_kernel_pages(1) 申请1页内核内存作为内核线程PCB
| | | init_thread() 在PCB中初始化线程基本信息
| | | 初始化PCB底部的线程信息struct task_struct
| | | 申请pid allocate_pid()
| | | thread_create(thread, function, func_arg)
| | | 初始化PCB中的thread_stack
| | | 不同于创建进程时的参数function为start_process,这里直接为所要创建的线程
| | | 即switch_to()任务切换后,将直接执行对应的线程函数
| | | kthread_stack->eip = kernel_thread 函数kernel_thread
| | | kthread_stack->function = function 线程对应的函数
| | | kthread_stack->func_arg = func_arg 线程参数
| | |
| | | list_append() 添加到就绪队列和全部队列
|
|---- FILE: thread/thread.c idle()
| | 系统空闲时运行的线程(block/unblock)
| | while(1){thread_block(TASK_BLOCKED); asm volatile("sti; hlt" : : : "memory");}
| | idle线程在创建时会被加入到就绪队列,因此会执行一次,然后阻塞;
| | 当就绪队列为空时,schedule会将idle解除阻塞,也就是唤醒
| |
| |---- thread_block()
| | | 当前线程将自己阻塞
| | | 修改线程状态为阻塞、触发调度,切换线程执行
| | | schedule() 由当前阻塞线程主动触发的任务调度
| | | 由于idle线程触发调度后没有被加入就绪队列,所以将得不到执行,除非被唤醒
| |
| |---- thread_unblock()
| | | 将指定的线程解阻塞
| | | 添加到就绪队列头部,修改状态为READY
| | | list_push(&thread_ready_list, &pthread->general_tag)
| | | pthread->status = TASK_READY
|
|---- FILE: kernel/main.c main()
| | 内核主线程
| | init_all()
| | thread_exit(running_thread(), true);
| | 主线程完成使命后退出 return 0;
|
|---- FILE: kernel/main.c init()
| | init进程
| | 第一个用户进程,pid为1
| | init是所有进程的父进程,它还要负责回收过继给它的子进程
| | if(fork()) // 父进程
| | { while(1){wait(&status);} }
| | else // 子进程
| | { my_shell(); }
3、中断和系统调用
详情见 下列 Blog
本项目支持的中断有:时钟、键盘、硬盘、int 0x80(系统调用)。
4、内存管理
详情见下列 Blog
内存管理(三)虚拟内存与物理内存的映射关系 & pagefault
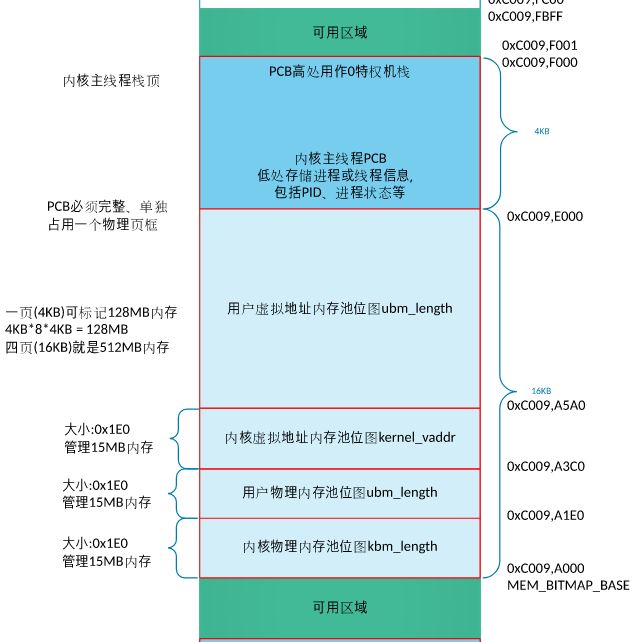
这里先从指定位置处读取LOADER写入的物理内存大小。本项目中,物理内存的配置为32M(bochs配置文件bochsrc.cfg中”megs: 32”),减去低端的1MB、减去LOADER开启分页机制时创建PDT和PT占用的1MB(紧邻低端1MB之上),还有30MB,内核和用户内存池各占15M。所以,内核物理内存池的起始地址为 0x20_0000(2MB)。
以页(4KB)为单位的内存管理,采用bitmap(位图)技术。本项目中,自定义内核物理内存的bitmap存放于0xc009_a000,自定义内核主线程栈顶为0xc009_f000、内核主线程PCB为0xc009_e000。所以,本系统最大支持4个页框的位图(一个页框大小的位图可表示128M内存,4个页框即512M),用于内核/用户物理内存池bitmap、内核虚拟地址池bitmap。
9f000 - 1000 = 9e000 作为主线程的 PCB
9e000 - 4000 = 9a000 作为位图地址,可以容纳 4 个页框
实现方法类似 Linux 中的伙伴系统,在以页(4KB)为单位的内存管理基础上,实现小内存块的管理,可满足任意内存大小的分配与释放(malloc/free)。这里采用arena模型。
5、任务调度
传统操作系统的调度基于分时(time sharing)技术: 多个进程以”时间多路复用”方式运行,因为CPU的时间被分成”片(slice)”,给每个可运行进程分配一片CPU时间片,当然单处理器在任何给定的时刻只能运行一个进程。
如果当前可运行进程的时限(quantum)到期时(即时间片用尽),而该进程还没有运行完毕,进程切换就可以发生。
分时依赖于定时中断,因此对进程是透明的,不需要在承租中插入额外的代码来保证CPU分时。
这也是HuSharpOS 的实现策略
详情见 此 Blog
6、文件系统
详情见 文件系统总结
7、Shell
CRT相关
fork 、execv、wait、load、cmd_execute
详情见 进程管理(二)shell 是如何运行程序的? & 进程的创建
8、锁
二元信号量的锁
锁
| struct lock pid_lock; // 申请pid FILE: thread/thread.c
| struct lock console_lock; // 控制台锁 FILE: device/console.c console_init()
|
|---- FILE: thread/sync.c lock_init(&console_lock)
| | 初始化锁
| | 基于二元信号量实现的锁
| | struct semaphore{
| | unsigned char value; struct list waiters; };
| | 信号量初值,此信号量上阻塞的所有线程
| | struct lock{
| | struct task_struct *holder; struct semaphore sema; unsigned int holder_repeat_num; };
| | 锁的持有者,信号量,锁的持有者重复申请锁的次数
|
|---- FILE: thread/sync.c lock_acquire()
| | 获取锁
| | sema_down(&lock->semaphore)信号量P操作
| | while(sema->value == 0) // value为0表明已经被别人持有
| | list_append()当前线程把自己加入该锁的等待队列
| | thread_block()当前线程阻塞自己,并触发调度,切换线程
| | ************************************* 调度 *********
| | lock->holder = running_thread()
| |
| |---- FILE: thread/thread.c thread_block()
| | 当前线程将自己阻塞
| | 修改线程状态为阻塞、触发调度,切换线程执行
| |
| |---- FILE: thread/thread.c schedule()
| | 任务调度 (由当前阻塞线程主动触发)
|
|---- FILE: thread/sync.c lock_release()
| 释放锁
| lock->holder = NULL
| sema_up(&lock->semaphore)信号量V操作
| list_pop(&sema->waiters)从等待队列中取出一个线程
| thread_unblock()唤醒该阻塞线程: 将阻塞线程加入就绪队列,并修改状态为READY
| sema->value++
|
|---- FILE: thread/thread.c thread_unblock()
| 唤醒阻塞线程
| 将阻塞线程加入就绪队列,并修改状态为READY
信号解析见此 Blog
9、环形队列
生产者消费者模型
环形队列
| struct ioqueue keyboard_buf; // 键盘
| struct ioqueue * xxx = xxx; // 管道
|
|---- FILE: device/ioqueue.c ioqueue_init(&keyboard_buf)
| | 初始化环形队列
| | 结合锁机制、生产者消费者模型
| | struct ioqueue{
| | struct lock lock; // 锁
| | struct task_struct *producer, *consumer; // 睡眠的生产者/消费者
| | char buf[buffersize]; // 缓冲区
| | signed int head, tail; }; // 队首写入,队尾读出
|
|---- FILE: device/ioqueue.c ioq_getchar()
| | 消费者消费一个字符
| | while(ioq_empty(ioq)) // 缓冲区为空时,消费者睡眠
| | lock_acquire(&ioq->lock); // 获取锁,每个锁对应的信号量都会有一个阻塞队列
| | ioq_wait(&ioq->consumer); // 消费者睡眠
| | lock_release(&ioq->lock); // 释放锁
| | char byte = ioq->buf[ioq->tail]; // 消费一个字符
| | if(ioq->producer !=NULL) wakeup(&ioq->producer); // 唤醒生产者(生产者睡眠是因为缓冲区满)
|
|---- FILE: device/ioqueue.c ioq_putchar()
| | 生产者生产一个字符
| | while(ioq_full(ioq)) // 缓冲区满时,生产者睡眠
| | lock_acquire(&ioq->lock); // 获取锁,每个锁对应的信号量都会有一个阻塞队列
| | ioq_wait(&ioq->producer); // 生产者睡眠
| | lock_release(&ioq->lock); // 释放锁
| | ioq->buf[ioq->head] = byte; // 生产一个字符
| | if(ioq->consumer !=NULL) wakeup(&ioq->consumer); // 唤醒消费者(消费者睡眠是因为缓冲区空)
名词解释
全局描述符表:保护模式下内存段的登记表 即位于 Loader 0x900处 描述符desc 占 8 个字节,含有 base,limit,addr等 选择子:位于段寄存器,是 GDT 的索引 ——–选择子结构——— 15 3 2 0
描述符索引值 TI RPL
而 total_mem_bytes 与loader.bin 之间还有 4 个段描述符(第 0 个不可用,第 1 个为代码段,第 2 个为数据段和栈,第 3 个为显存段) 以及 60 个预留段描述符槽位,因此 (60 + 4) * 8 = 512 = 0x200 total_mem_bytes : 0xb00 (存储获取到的内存变量)
页目录表: (物理地址)0x100000~0x100fff 4KB 第一个页表:(物理地址)0x101000~0x101fff 4KB 为映射到 0xc0000000,对应的页目录项为第 768 个,由于一个页表(页表项4字节)表示 4MB = (4GB/4KB)*4字节 所以第 768 个页目录项对应的虚拟地址 4MB:0xc0000000~0xc003ffff 指向低端 4MB之内的物理地址 为了实现所有用户共享内核,因此将 各个用户的虚拟地址高 1 GB都指向内核所在的物理内存空间。即每个用户 768~1022(共254个PDE)都与其他进程一致。(即:提前将内核的所有PDE都定下来,在创建用户进程时,直接将内核对应PDE复制,以达到内核共享)。
虚拟地址 0xc0000000~0xc00fffff 映射 物理地址 0x00000000~0x000fffff(低端 1Mb 内存) 0xc0100000:堆的起始地址(注意:由于0x100000~0x101fff为页目录表和页表,因此 0xc0100000并不映射到此处,需要绕开) 0xc009f000 内核主线程栈顶 0xc009e000 内核主线程的pcb. PCB占用 1 页 0x1000 0xc009a000 位图位置 0xc0000000 内核从虚拟地址3G起. 0x100000意指跨过低端1M内存
0x9f000:内核主线程栈顶 内核估计 70 kb 左右。装载到 0x9f000绰绰有余 因此在 低端 1MB 下所用到的最高地址,即为 main线程的栈顶地址 0x9f000
0xc009a000:位图位置 一个页框大小的位图可表示128M内存, 位图位置安排在地址0xc009a000
由于 虚拟机配置 32 MB 物理内存,因此需要 1024 字节 bitmap -> 4kb * 1024 * 8 = 32 MB 即 1/4 页 ,但是我很任性,想搞 4 页,即 0x4000 又因为 pcb 位于 0xc009e000,所以将位图放在下面 0xc009e000 - 0x4000 = 0xc009a000
堆的起始地址:(为了让虚拟地址连续)
define K_HEAP_START 0xc0100000
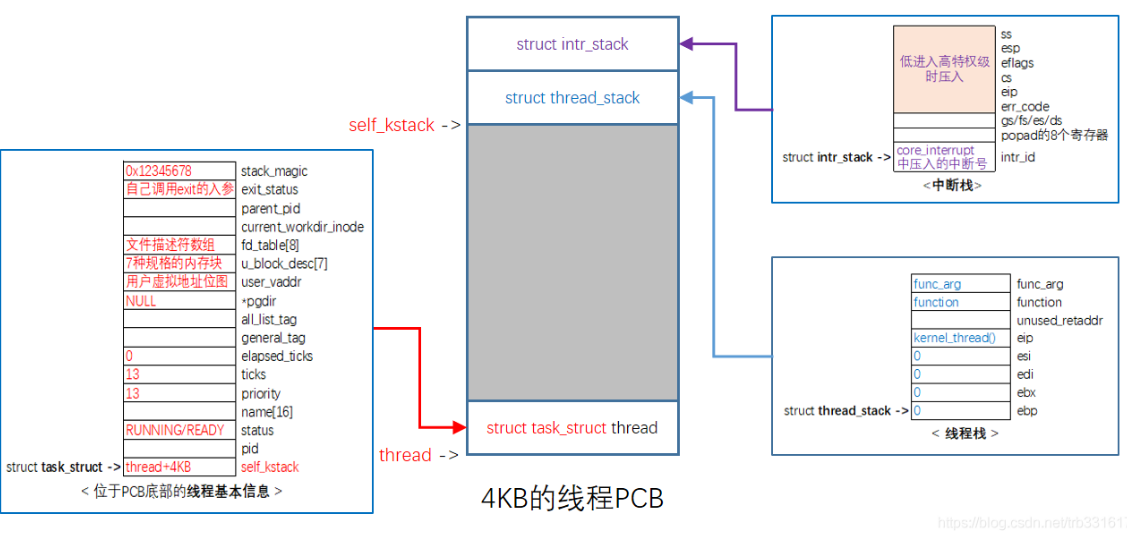
PCB ----> task_struct
struct task_struct {
uint32_t* self_kstack; // 各内核线程都用自己的内核栈,用来记录栈顶指针
_pid_t pid;
enum task_status status;
char name[16];
uint8_t priority;
uint8_t ticks; // 每次在处理器上执行的时间嘀嗒数
uint32_t elapsed_ticks; // 此任务自上cpu运行后至今占用了多少cpu嘀嗒数,也就是此任务执行了多久
struct list_elem general_tag;//general_tag的作用是用于线程在一般的队列中的结点
struct list_elem all_list_tag;// all_list_tag的作用是用于线程队列thread_all_list中的结点
uint32_t* pgdir; // 进程自己页表的虚拟地址
struct virtual_addr userprog_vaddr; // 用户进程的虚拟地址
uint32_t stack_magic; // 用这串数字做栈的边界标记,用于检测栈的溢出
};
寄存器映像 —中断栈 intr_stack: | kernel.S 中的 intr_exit 的出栈操作为此结构的逆操作 1.任务被中断时,保存寄存器映像 2.给进程预留,用来填充用户进程上下文,即寄存器环境 栈 —线程栈 thread_stack:保存待运行的函数,并进行任务切换 | 内核栈 = 中断栈 + 线程栈 栈指针 —记录线程栈栈顶,因为中断栈不固定 <—-self_kstack pid 进程状态 优先级 时间片 页表 打开文件描述符 父进程 …
系统调用步骤:
- 在 syscall.h 的结构 enum SYSCALL_NR 中添加新的子功能号
- 在 syscall.c 中增加系统调用的用户接口
- 在 syscall_init.c 定义子功能处理函数,并在syscall_table 中注册
端口就是位于 IO 控制器上的接口
command 寄存器要最后写入,因此一旦写入,硬盘便开始工作
实现的系统调用
syscall_table[SYS_GETPID] = sys_getpid;
syscall_table[SYS_WRITE] = sys_write;
syscall_table[SYS_MALLOC] = sys_malloc;
syscall_table[SYS_FREE] = sys_free;
syscall_table[SYS_FORK] = sys_fork;
syscall_table[SYS_READ] = sys_read;
syscall_table[SYS_PUTCHAR] = sys_putchar;
syscall_table[SYS_CLEAR] = cls_screen; // 位于 print.S
syscall_table[SYS_GETCWD] = sys_getcwd;
syscall_table[SYS_OPEN] = sys_open;
syscall_table[SYS_CLOSE] = sys_close;
syscall_table[SYS_LSEEK] = sys_lseek;
syscall_table[SYS_UNLINK] = sys_unlink;
syscall_table[SYS_MKDIR] = sys_mkdir;
syscall_table[SYS_OPENDIR] = sys_opendir;
syscall_table[SYS_CLOSEDIR] = sys_closedir;
syscall_table[SYS_CHDIR] = sys_chdir;
syscall_table[SYS_RMDIR] = sys_rmdir;
syscall_table[SYS_READDIR] = sys_readdir;
syscall_table[SYS_REWINDDIR] = sys_rewinddir;
syscall_table[SYS_STAT] = sys_stat;
syscall_table[SYS_PS] = sys_ps;
syscall_table[SYS_EXECV] = sys_execv;
实现函数
uint32_t getpid(void);
uint32_t write(int32_t fd, const void* buf, uint32_t count);
void* malloc(uint32_t size);
void free(void* ptr);
int16_t fork(void);
int32_t read(int32_t fd, void* buf, uint32_t count);
void putchar(char char_asci);
void clear(void);
char* getcwd(char* buf, uint32_t size);
int32_t open(char* pathname, uint8_t flag);
int32_t close(int32_t fd);
int32_t lseek(int32_t fd, int32_t offset, uint8_t whence);
int32_t unlink(const char* pathname);
int32_t mkdir(const char* pathname);
struct dir* opendir(const char* name);
int32_t closedir(struct dir* dir);
int32_t rmdir(const char* pathname);
struct dir_entry* readdir(struct dir* dir);
void rewinddir(struct dir* dir);
int32_t stat(const char* path, struct file_attr* buf);
int32_t chdir(const char* path);
void ps(void);
int execv(const char* pathname, char** argv);uint32_t getpid(void);
uint32_t write(int32_t fd, const void* buf, uint32_t count);
void* malloc(uint32_t size);
void free(void* ptr);
int16_t fork(void);
int32_t read(int32_t fd, void* buf, uint32_t count);
void putchar(char char_asci);
void clear(void);
char* getcwd(char* buf, uint32_t size);
int32_t open(char* pathname, uint8_t flag);
int32_t close(int32_t fd);
int32_t lseek(int32_t fd, int32_t offset, uint8_t whence);
int32_t unlink(const char* pathname);
int32_t mkdir(const char* pathname);
struct dir* opendir(const char* name);
int32_t closedir(struct dir* dir);
int32_t rmdir(const char* pathname);
struct dir_entry* readdir(struct dir* dir);
void rewinddir(struct dir* dir);
int32_t stat(const char* path, struct file_attr* buf);
int32_t chdir(const char* path);
void ps(void);
int execv(const char* pathname, char** argv);
over